An Approach to Elicit Human-Understandable Robot Expressions to Support Human-Robot Interaction
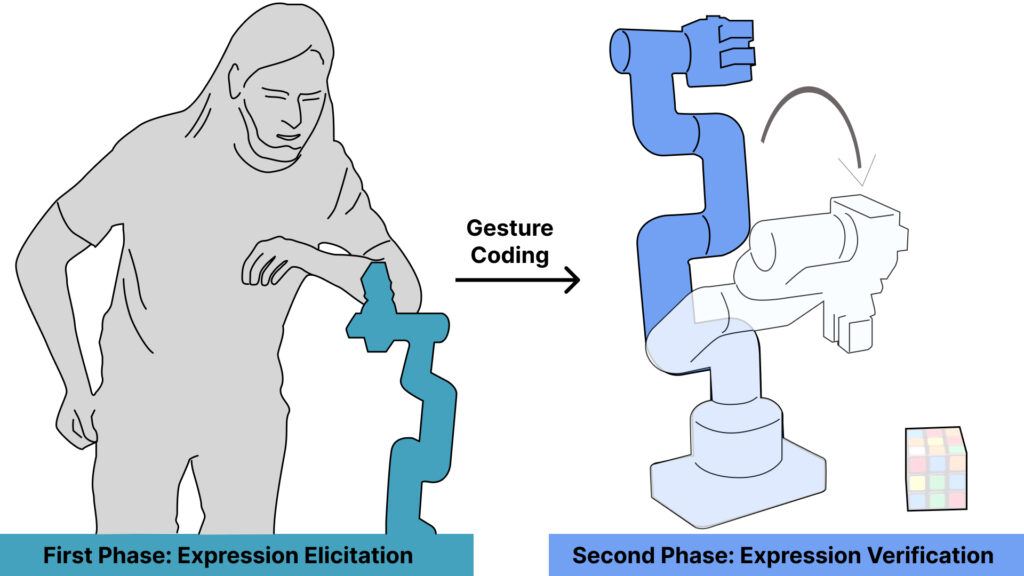
Full-Paper: Understanding the intentions of robots is essential for natural and seamless human-robot collaboration. Ensuring that robots have means for non-verbal communication is a basis for intuitive and implicit interaction. For this, we describe an approach to elicit and design human-understandable robot expressions. We outline the approach in the context of non-humanoid robots. We paired human mimicking and enactment with research from gesture elicitation in two phases: first, to elicit expressions, and second, to ensure they are understandable. We present an example application through two studies (N=16 & N=260) of our approach to elicit expressions for a simple 6-DoF robotic arm. We show that the approach enabled us to design robot expressions that signal curiosity and interest in getting attention. Our main contribution is an approach to generate and validate understandable expressions for robots, enabling more natural human-robot interaction.

Developing and Validating the Perceived System Curiosity Scale (PSC): Measuring Users’ Perceived Curiosity of Systems
Full-Paper: Like humans, today’s systems, such as robots and voice assistants, can express curiosity to learn and engage with their surroundings. While curiosity is a well-established human trait that enhances social connections and drives learning, no existing scales assess the perceived curiosity of systems. Thus, we introduce the Perceived System Curiosity (PSC) scale to determine how users perceive curious systems. We followed a standardized process of developing and validating scales, resulting in a validated 12-item scale with 3 individual sub-scales measuring explorative, investigative, and social dimensions of system curiosity. In total, we generated 831 items based on literature and recruited 414 participants for item selection and 320 additional participants for scale validation. Our results show that the PSC scale has inter-item reliability and convergent and construct validity. Thus, this scale provides an instrument to explore how perceived curiosity influences interactions with technical systems systematically.

Investigating LLM-Driven Curiosity in Human-Robot Interaction
Full-Paper: Integrating curious behavior traits into robots is essential for them to learn and adapt to new tasks over their lifetime and to enhance human-robot interaction. However, the effects of robots expressing curiosity on user perception, user interaction, and user experience in collaborative tasks are unclear. In this work, we present a Multimodal Large Language Model-based system that equips a robot with non-verbal and verbal curiosity traits. We conducted a user study (N = 20) to investigate how these traits modulate the robot’s behavior and the users’ impressions of sociability and quality of interaction. Participants prepared cocktails or pizzas with a robot, which was either curious or non-curious. Our results show that we could create user-centric curiosity, which users perceived as more human-like, inquisitive, and autonomous while resulting in a longer interaction time. We contribute a set of design recommendations allowing system designers to take advantage of curiosity in collaborative tasks.

Designing Effective Consent Mechanisms for Spontaneous Interactions in Augmented Reality
Full-Paper: Ubiquitous computing devices like Augmented Reality (AR) glasses allow countless spontaneous interactions – all serving different goals. AR devices rely on data transfer to personalize recommendations and adapt to the user. Today’s consent mechanisms, such as privacy policies, are suitable for long-lasting interactions; however, how users can consent to fast, spontaneous interactions is unclear. We first conducted two focus groups (N=17) to identify privacy-relevant scenarios in AR. We then conducted expert interviews (N=11) with co-design activities to establish effective consent mechanisms. Based on that, we contribute (1) a validated scenario taxonomy to define privacy-relevant AR interaction scenarios, (2) a flowchart to decide on the type of mechanisms considering contextual factors, (3) a design continuum and design aspects chart to create the mechanisms, and (4) a trade-off and prediction chart to evaluate the mechanism. Thus, we contribute a conceptual framework fostering a privacy-preserving future with AR.
ERP Markers of Visual and Semantic Processing in AI-Generated Images: From Perception to Meaning
Late-Breaking Work: Perceptual similarity assessment plays an important role in processing visual information, which is often employed in Human-AI interaction tasks such as object recognition or content generation. It is important to understand how humans perceive and evaluate visual similarity to iteratively generate outputs that meet the users’ expectations better and better. By leveraging physiological signals, systems can rely on users’ EEG responses to support the similarity assessment process. We conducted a study (N=20), presenting diverse AI-generated images as stimuli and evaluating their semantic similarity to a target image while recording event-related potentials (ERPs). Our results show that the P2 and N400 component distinguishes medium, and high similarity of images, while the low similarity of images did not show a significant impact. Thus, we demonstrate that ERPs allow us to assess the users’ perceived visual similarity to support rapid interactions with human-AI systems.
SIG PhysioCHI: Human-Centered Physiological Computing in Practice
Special Interest Group: In recent years, integrating physiological signals in Human-Computer Interaction research has significantly advanced our understanding of user experiences and interactions. However, the interdisciplinary nature of this research presents numerous challenges, including the need for standardized protocols and reporting guidelines. By fostering cross-disciplinary collaboration, we seek to enhance the reproducibility, transparency, and ethical considerations of physiological data in HCI. The purpose of this SIG is to offer a lightweight opportunity for CHI attendees to connect with the community around the center point of physiological computing. This SIG will address key topics such as technical challenges, ethical implications, reproducibility, and open science. We aim to meet as a community and connect with HCI researchers and practitioners to network and exchange bi-directional ideas. Ultimately, our goal is to create a foundation for future research and to establish a community around physiological computing.
More information: https://physiohci.com/chi25sig/